Termination Manager#
The Termination Manager handles episode termination conditions in your RL environment. It determines when episodes should end, distinguishes between timeouts and failures, and provides automatic logging of termination reasons.
You can see a full example using the reward manager in examples/rough_terrain.
Basic Usage#
from genesis_forge.managers import TerminationManager
from genesis_forge.mdp import terminations
class MyEnv(ManagedEnvironment):
def config(self):
self.termination_manager = TerminationManager(
self,
logging_enabled=True,
term_cfg={
"timeout": {
"fn": terminations.timeout, # Ends the episode when it reaches the maximum steps (env.max_episode_length)
"time_out": True, # This is a timeout, not failure
},
"fall_over": {
"fn": terminations.bad_orientation, # Terminate if the robot is falling over
"params": {"limit_angle": 0.5}, # 28 degrees
},
},
)
Termination Configuration#
Each termination condition has:
fn: Function that returns boolean tensor indicating termination
params: Optional parameters for the function
time_out: Whether this is a timeout (
True) or failure (False, default)
TerminationManager(
self,
term_cfg={
"max_episode_length": {
"fn": terminations.timeout,
"time_out": True, # Normal episode end
},
"robot_fell": {
"fn": terminations.bad_orientation,
"params": {"limit_angle": 0.3},
},
"out_of_bounds": {
"fn": lambda env: torch.norm(env.robot.get_pos()[:, :2], dim=1) > 5.0,
},
},
)
Built-in Termination Functions#
Genesis Forge provides common termination conditions in genesis_forge.mdp.terminations:
term_cfg={
"timeout": {
"fn": terminations.base_height_below_minimum,
"params": {
"minimum_height": 0.05,
}
},
}
Custom Termination Functions#
A custom termination function takes in the environment as the first parameter, as well as any other parameter which will be defined in the params dict at the TerminationManager. The returned value should be a tensor (shape: (num_envs,)) with a bool value for each environment.
def velocity_limit(env, max_velocity=10.0):
"""Terminate if robot moves too fast."""
velocity = torch.norm(env.robot.get_vel(), dim=1)
return velocity > max_velocity
TerminationManager(
self,
term_cfg={
"too_fast": {
"fn": velocity_limit,
"params": {"max_velocity": 8.0},
},
},
)
Timeout vs Termination#
Understanding the distinction is important for RL algorithms:
Timeout (
time_out=True): Natural episode end, not a failureEpisode reached max length
Task successfully completed
Training scenario ended
Termination (
time_out=False): Episode ended due to failureRobot fell over
Violated safety constraints
Task failed
Curriculum-Based Termination#
Adjust termination criteria during training:
class MyEnv(ManagedEnvironment):
def config(self):
self.termination_manager = TerminationManager(self, term_cfg={
"timeout": {
"fn": terminations.timeout,
"time_out": True,
},
"bad_orientation": {
"fn": terminations.bad_orientation,
"params": {"angle_limit": 25},
},
"too_low": {
"fn": terminations.base_height_below_minimum,
"params": {
"minimum_height": 0.05
}
}
})
def step(self):
self.update_curriculum()
return super().step(actions)
def update_curriculum(self):
"""Make termination criteria stricter over time."""
if self.step_count > 200:
# Mid: moderate
angle_limit = 20
height_threshold = 0.10
else:
# Late: strict
angle_limit = 17
height_threshold = 0.15
# Update termination parameters
self.termination_manager.term_cfg["bad_orientation"].params["angle_limit"] = angle_limit
self.termination_manager.term_cfg["too_low"].params["minimum_height"] = height_threshold
Logging and Analysis#
By default, individual termination averages are logged to the episode item in the extras/infos dict. For many RL frameworks, like rsl_rl and skrl, items there will automatically be logged to tensorboard, or simular system. Terminations will be placed under the “Terminations” section.
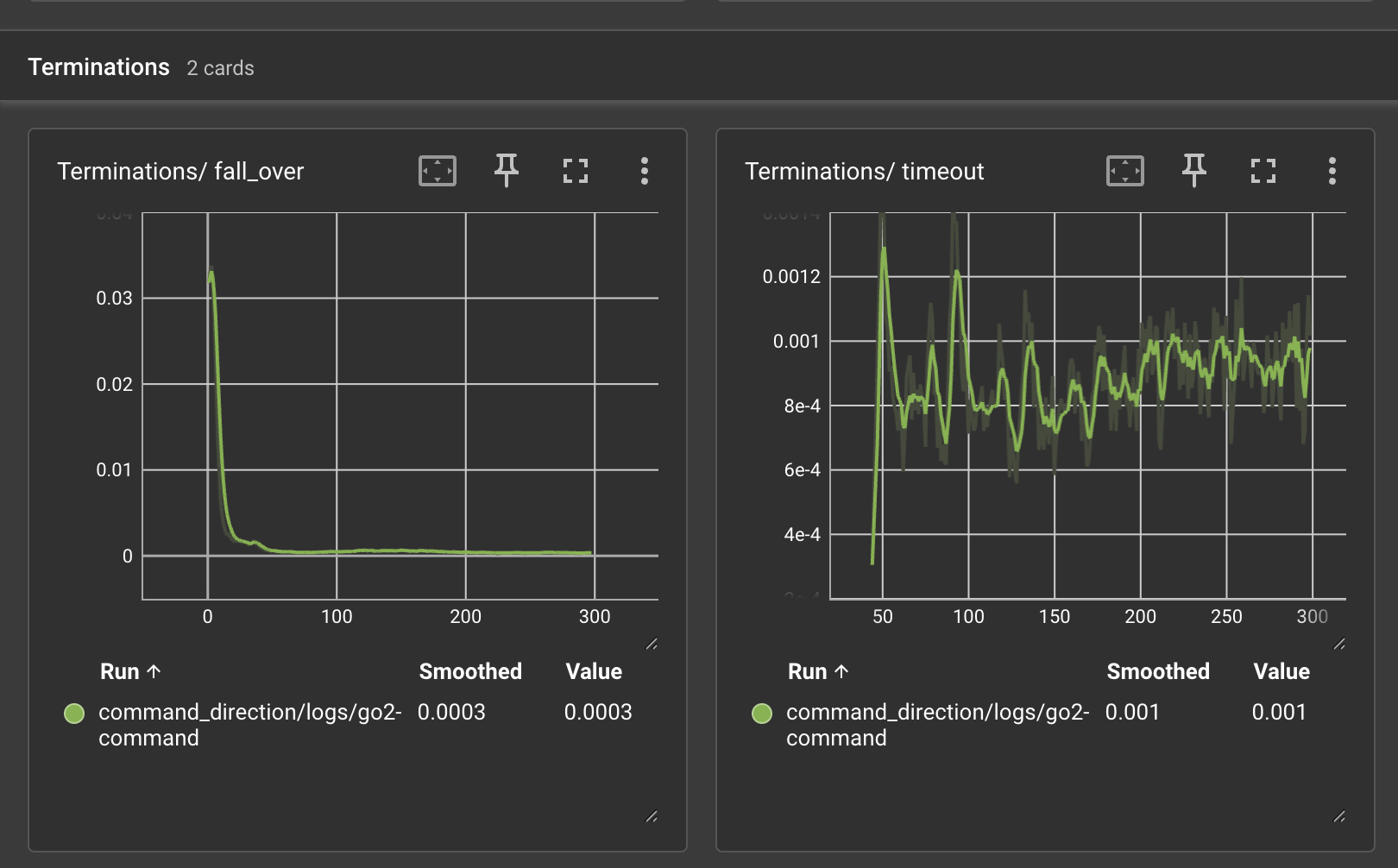
Example tensorboard termination logging#
To disable logging, set logging_enabled to False. To change the extras dict key that termination items are logged to, set the extras_logging_key param on the environment.